






Description
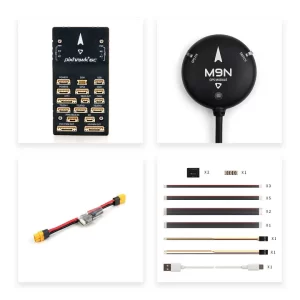
Pixhawk 6X Flight Controller – Pro-Grade Autopilot for UAVs
The Pixhawk 6X Flight Controller is a next-generation autopilot system designed for professional drone applications. Featuring a powerful STM32H753 processor, triple IMU redundancy, and robust I/O options, it’s engineered for industrial UAVs including surveying drones, mapping systems, and precision agriculture platforms.
Compatible with both PX4 and ArduPilot, the Pixhawk 6X ensures seamless integration into new or existing drone builds.
Key Features & Highlights
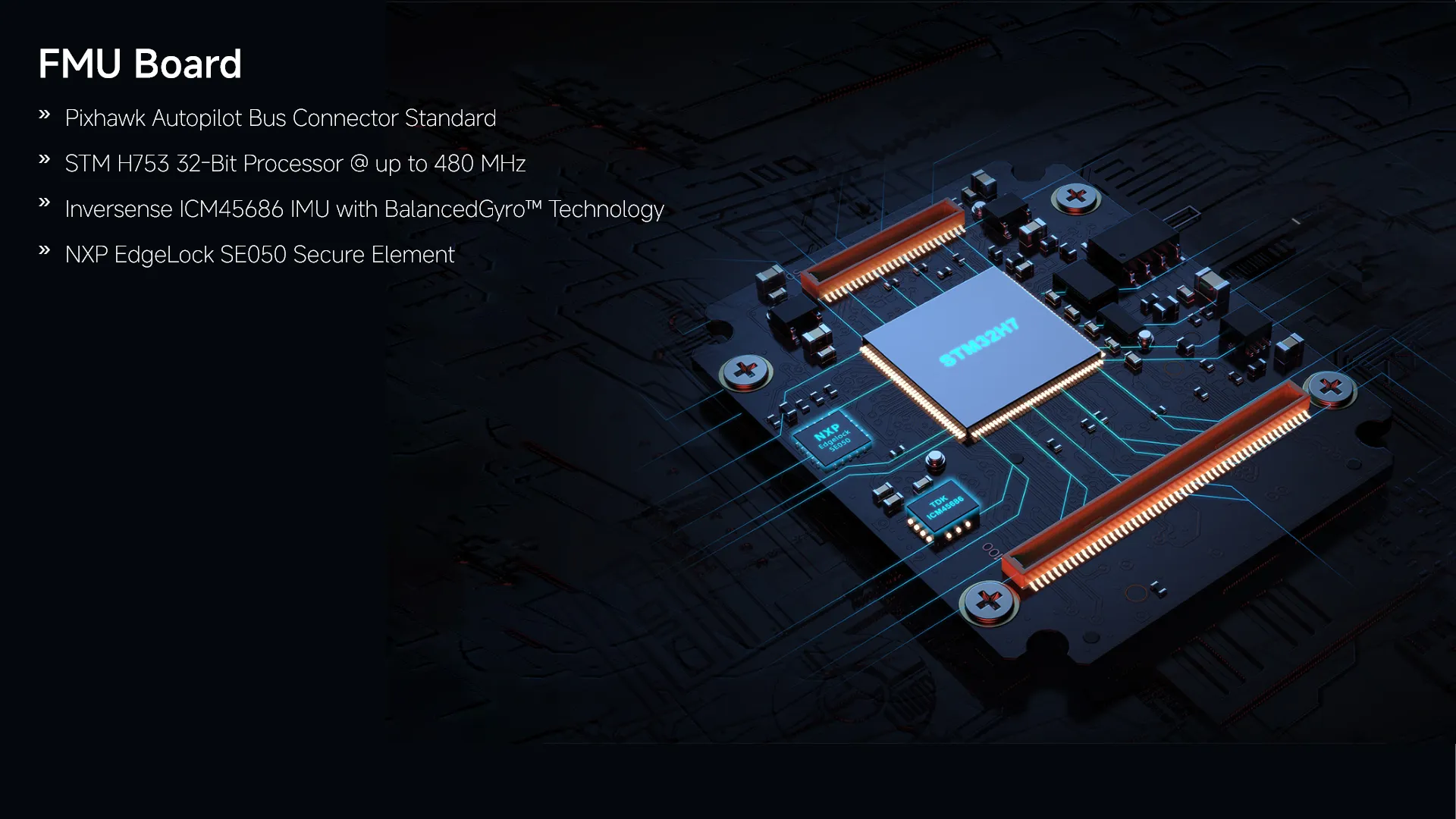
- Triple IMU Redundancy: 3x ICM-45686 IMUs using BalancedGyro™ tech and dual barometers for fault-tolerant navigation
- High-Performance Processor: STM32H753 Arm® Cortex®-M7 running at 480 MHz with 2MB Flash & 1MB RAM
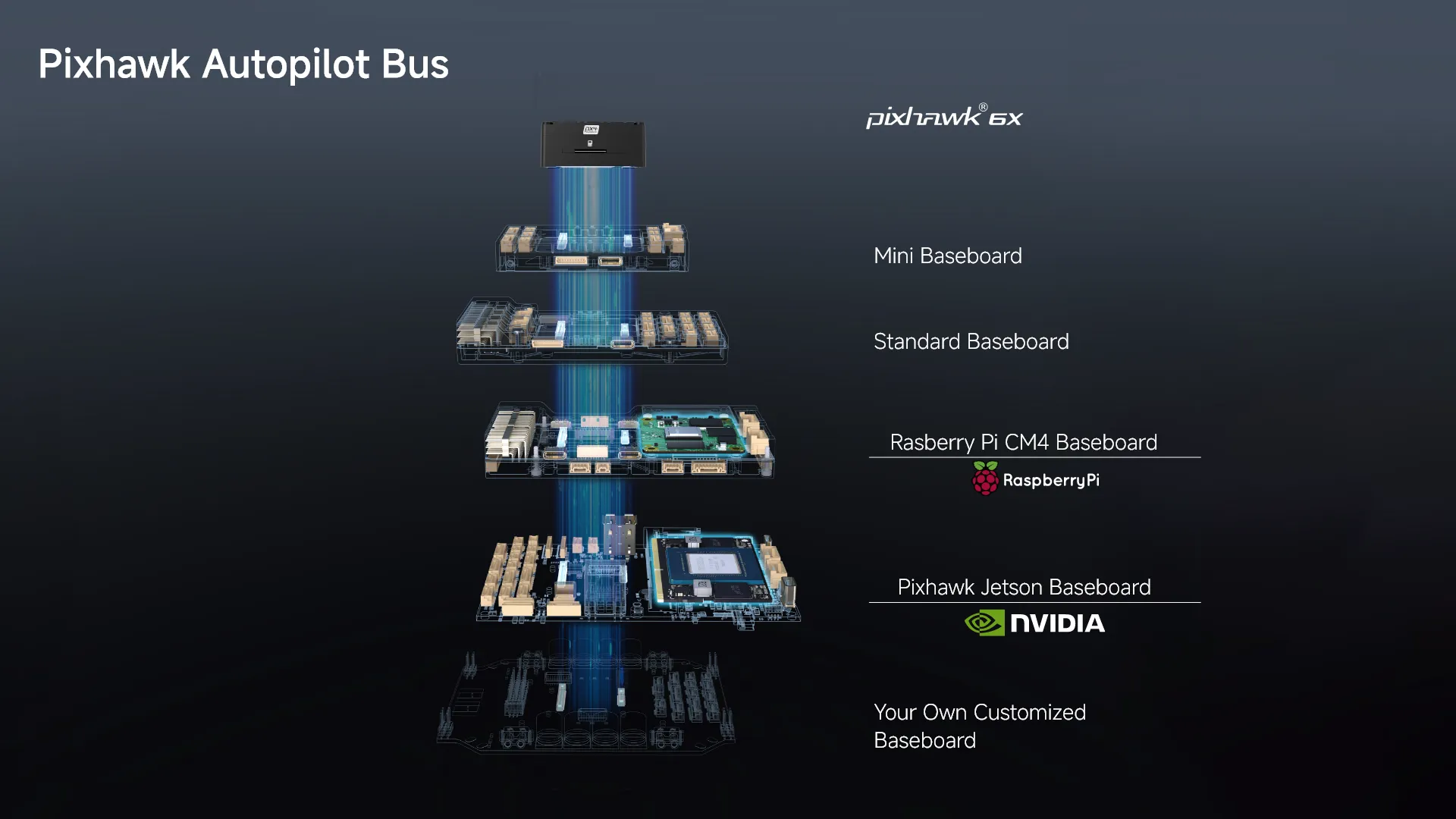
- Modular Flight Design: Independent FMU, IMU & baseboard connected via 100-pin & 50-pin Pixhawk® Autopilot Bus
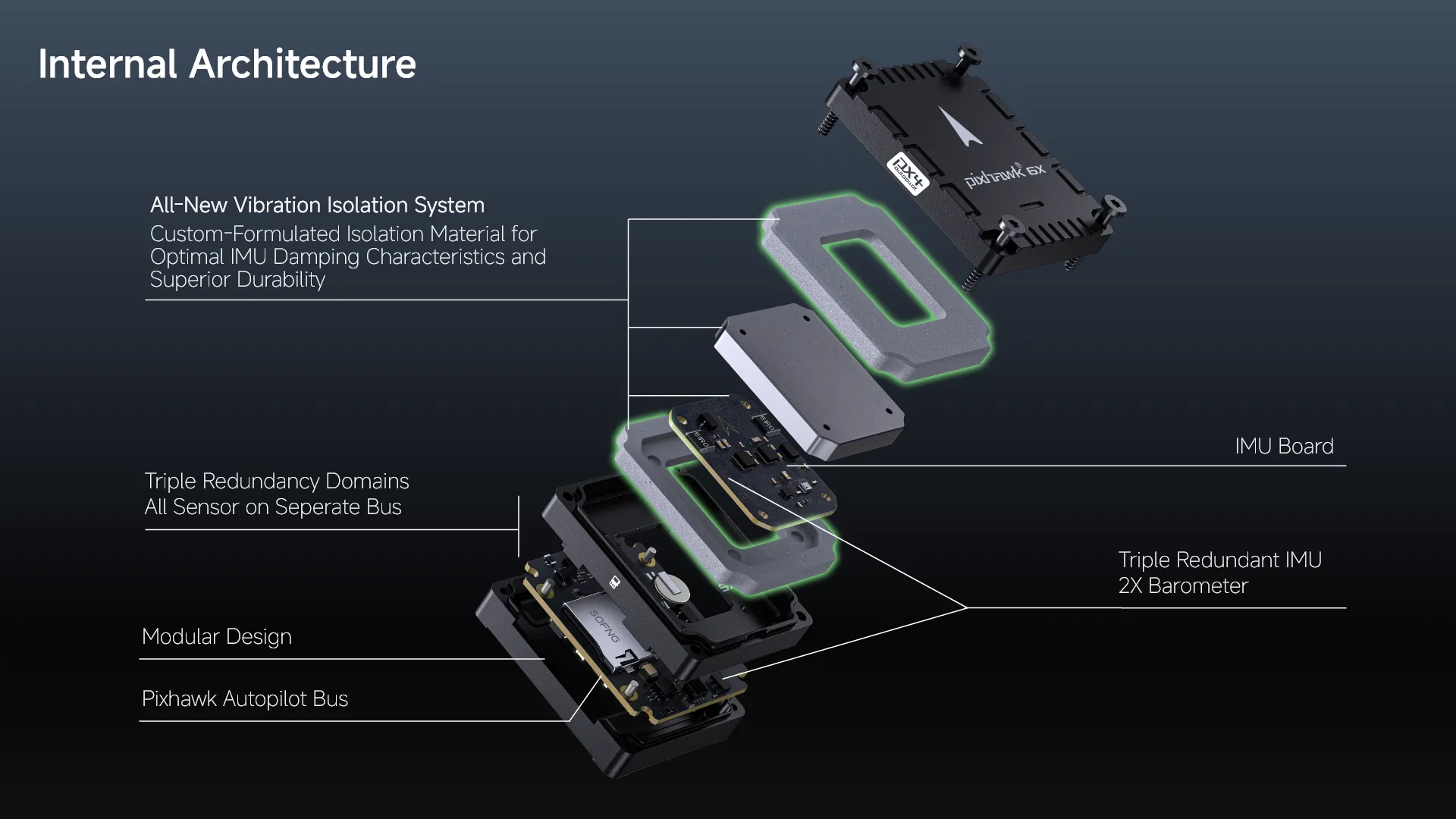
- Vibration Isolation System: Custom high-frequency isolation material—ideal for rugged environments
- Temperature-Controlled IMU Board: Maintains optimal working temperature for accurate readings
- Ethernet Interface: High-speed companion computer communication with optional transformerless setup
- Triple Redundancy Domains: Isolated power & communication paths for maximum reliability
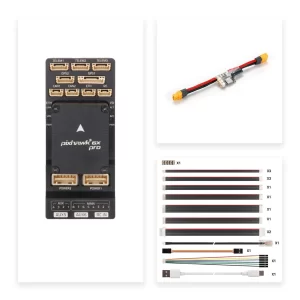
All-New Vibration Isolation Design
This innovative system replaces traditional foam with industrial-grade material, delivering superior damping at high-frequency resonance. Derived from the Pixhawk 6X Pro, it ensures optimal IMU stability for commercial and research-grade UAVs.
Technical Specifications
Processors & Sensors
- FMU: STM32H753 | Cortex®-M7 | 480 MHz | 2MB Flash | 1MB RAM
- IO: STM32F103 | Cortex®-M3 | 72 MHz | 64KB SRAM
- IMUs (Rev8):
- 3x ICM-45686 (BalancedGyro™)
- Barometers: ICP20100 & BMP388
- Magnetometer: BMM150
- IMUs (Rev3/4):
- BMI088 / ICM-20649 / ICM-42688-P / ICM-42670-P
- Mag: BMM150
- Barometer: 2x BMP388
- Security: NXP EdgeLock SE050 Secure Element
Electrical Data
- Input Voltage:
- Max: 6V
- USB: 4.75 – 5.25V
- Servo Rail: 0 – 36V
- Current Limits:
- Telem1: 1.5A
- All Other Ports Combined: 1.5A
- PWM Signal: 3.3V default (adjustable to 5V via onboard resistor)
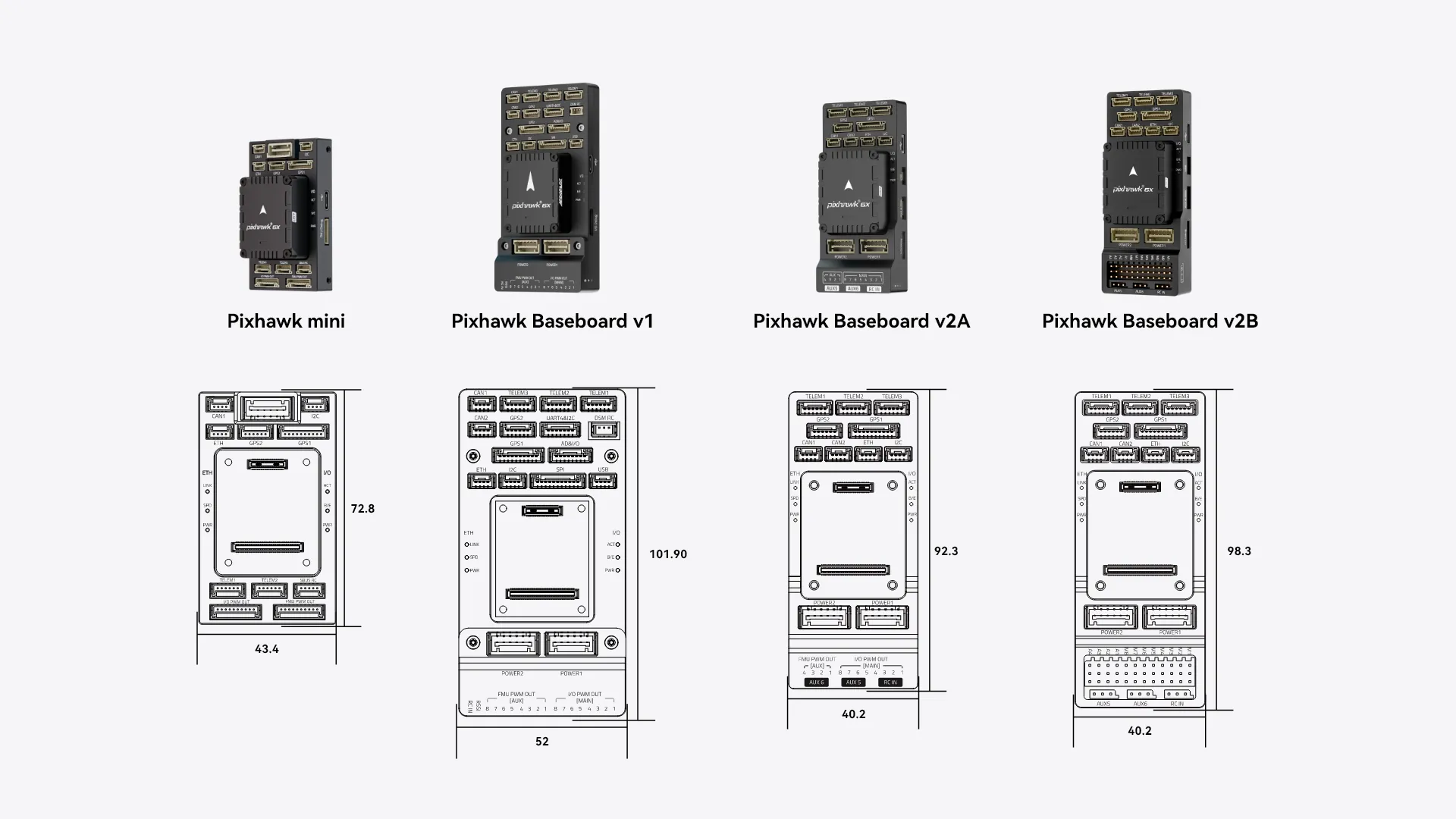
Mechanical Data
- Dimensions:
- Flight Controller: 38.8 x 31.8 x 16.8mm
- Standard Baseboard (Aluminum): 52.4 x 102 x 16.7mm
- Mini Baseboard: 43.4 x 72.8 x 14.2mm
- Weight:
- Flight Controller: 31.3g
- Standard Baseboard: 72.5g
- Mini Baseboard: 26.5g
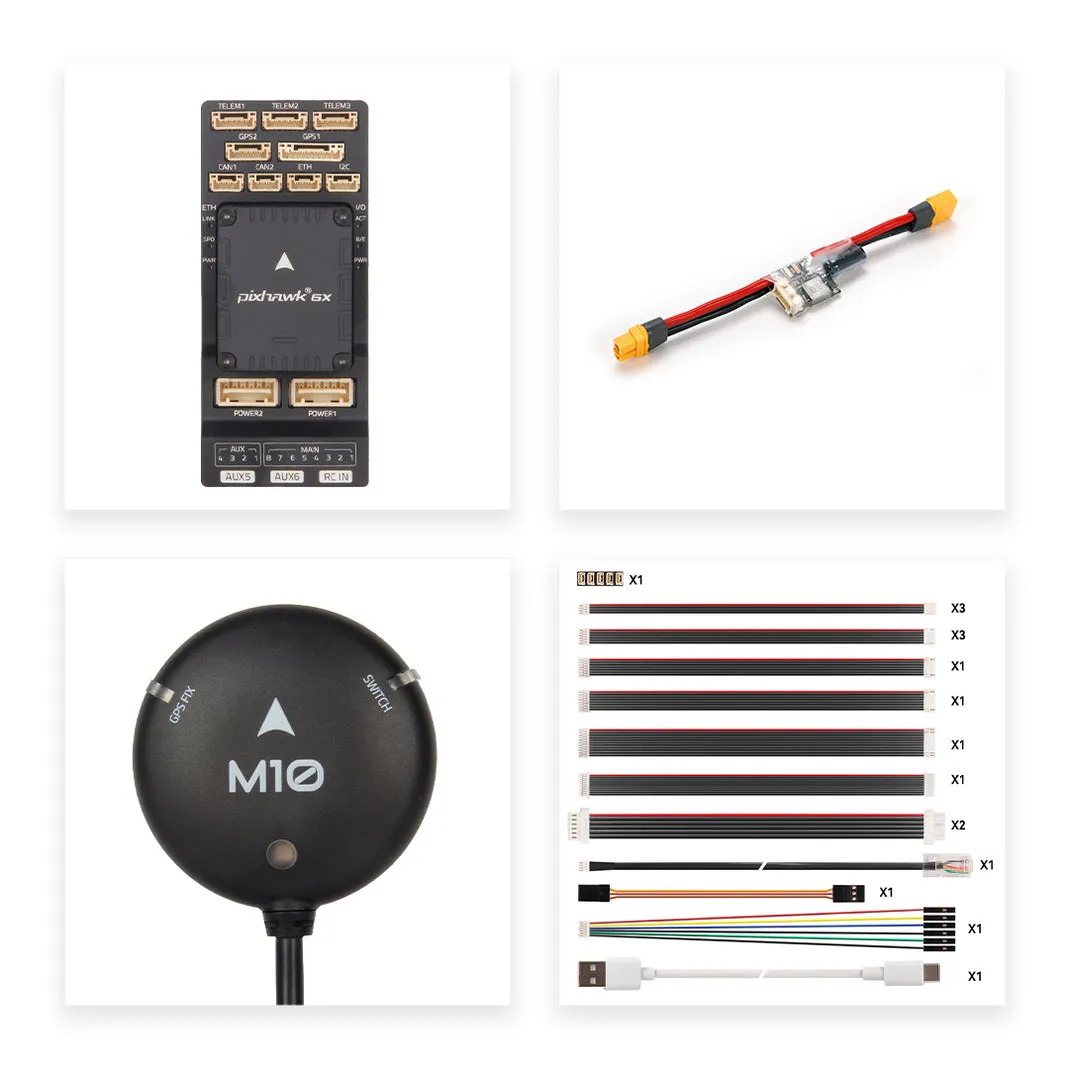
Product Gallery


Ideal For
- Survey & Mapping UAVs
- Precision Agriculture
- Commercial Drone Platforms
- University Research Projects